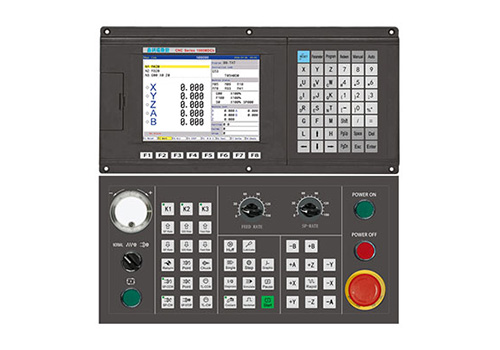
Newker i8 ROBOT Kontrol Ünitesi

Genel özellikler
- Optimize edilmiş yapısal algoritma
- Çeşitli uygulamalar için, modüler fonksiyon ayarları
- 8 Eksen kontrol
- 2 Yardımcı Eksen(Lineer Eksen ve Konumlandırıcı
- Multi-Turn Absolute tip enkoderli motorlara uygun
- 32x48 I/O Noktası, online PLC düzenleyici
- BUS tipi dahili anakart sayesinde, yapısal genişlemelere uygun
- Bir çok tip robot uygulamasına uygun, kullanımı ve programlaması kolay
- Wi-Fi üzerinden dosya gönderebilme imkanı
Teknik özellikler
- 4-6 Eklem ekseni ve 2 yardımcı eksen (ataşman eksen)
- Teach Pendant: 8”TFT LCD, Dokunmatik ekran, Switch mod, Acil Stop, Safety
- Haberleşmeli Absolute Enkoderli Motorlar
- Bağlantılar;
Genişletilebilir 48x32 I/O
2 yönlü 0-10V analog çıkış
1 yönlü ortogonal enkoder girişi
Frenli motorlar için 6 nokta çıkış
Robot bağlantısı için özel terminal - Çalıştırma; Öğretin, yeniden görün, uzaktan kumanda edin
- Program; Klavye, öğretme, teknik
- Motion; PTP (noktadan noktaya), düz, yay çizme
- Kullanım; Motion, lojik, hesaplama teknikleri, ayrıca kontrolcü üzerinden CNC kodlarının kullanılabilmesi imkanı
- Kordinat sistemi; Kullanıcı koordinatı, eklemsel koordinat, dünya koordinatı
- PLC; 8000 Step ladder diagram
- Alarm; Acil durma, Sürücü alarmı, Güvenlik, Bakım, Anormal ark, Anormal koordinat sistemi
- Robot Türleri;
Çok eklemli robotlar (Articulated Robot)
Dikey eklemli paralelogram robotlar (Kartezyen Robot)
Cobot Robotlar
Polar Robotlar
Scara Robotlar
Delta Robotlar
Özel Robotlar - Uygulama alanlar;
Taşıma
Kaynak
Boyama
Paletleme
Kesme
Polisaj
Dövme
Döküm
Ve birçok farklı uygulama..
NEWker-i8 Uygulamalar

Delta Robot

Cobot Robot

Articulated Robot

Scara Robot
-
Komutlar
To specify the current of welding by instruction AA or S AA/S To specify the voltage of welding by instruction VV or SS VV/SS Instruction of start arc welding AS* Instruction of end arc welding AE* Instruction of start swing welding WS* Instruction of end swing welding WE* Motion instruction of robot (Simple instruction and whole instruction): A.Joint motion MJ or MOVJ or G0 B.Straight line motion ML or MOVL or G1 C.Arc motion MC or MOVC or G6 Speed instruction V/F V= specify feding speed Rapid Override of Speed VJ VJ= specify ratio of rapid feeding Variable PL PL= specify continuous variable between the segments Start translation SN* End translation SF Read the current user coordinate PK*** Calculate the translation according to number of two position PX*** =PT*** - PT*** Plus and minus in translation PX*** =PT*** - PT***
PX*** =PT*** + PT***